icra2020
BRAIN-PIL workshop on *New advances in Brain-inspired Perception, Interaction and Learning*
Brain-PIL Workshop - virtual
New advances in brain-inspired perception, interaction and learning
Full-day workshop May 31st at the IEEE International Conference on Robotics and Automation (ICRA 2020)
The virtual workshop will be under ZOOM if you have registered but you do not have the link contact the organizers
- Recorded workshop (streaming link): http://www.youtube.com/watch?v=QMOTv2TXjzE
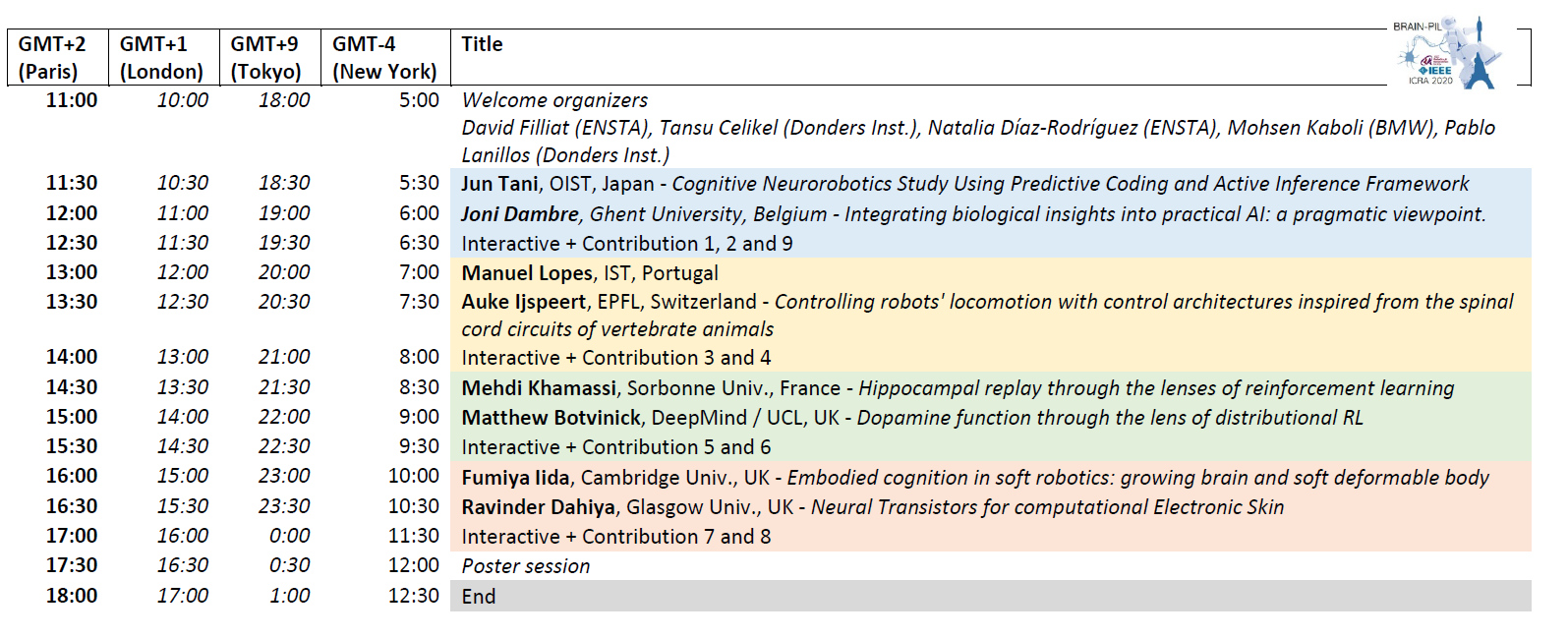
Final Program
Check your closest timezone to not miss any talk! link to pdf
Contributions
-
Alex Pitti, Mathias Quoy, Sofiane Boucenna and Catherine Lavandier. Complementary Working Memories using Free-Energy Optimization for Learning Features and Structure in Sequences pdf
-
Zhenduo Zhai and Ismail Akturk. Exploiting Refractory Period for Functional Multiplexing and Short-Term Memory in Spiking Neural Networks pdf
-
Mohamed Baioumy, Matías Mattamala and Nick Hawes. Variational Inference for Predictive and Reactive Controllers pdf
-
Elnaz Soleimani, Abdelghani Chibani and Ghazaleh Khodabandehlou. Robust Semi-Supervised Adversarial Subject-Level Transfer Learning for Sensor-Based Human Activity Recognition pdf
-
Cansu Sancaktar, Guillermo Oliver, Pablo Lanillos. Deep Active Inference for robot body perception and action pdf
-
Adrien Bennetot, Vicky Charisi and Natalia Díaz-Rodríguez. Should artificial agents ask for help in human-robot collaborative problem-solving? pdf
-
Zhicong Xian, Tabish Chaudhary and Jürgen Bock. Making Sense of Touch: Unsupervised Shapelet Learning in Bag-of-words Sense pdf
-
Ali Alqallaf and Gerardo Aragon-Camarasa. A Pilot Investigation of Robotic Self-Awareness pdf
-
M. Yunus Seker, Erhan Oztop, Mete Tuluhan Akbulut, Yukie Nagai, Minoru Asada, and Emre Ugur. Towards a Mirror Neuron System via Dual Channel Conditional Neural Movement Primitives pdf
Participate
Do you want to join the WS, pose questions and participate in the discussion?
Join for free (limited attendants) by ![]() registering here
registering here
Dates
- Workshop day May 31, 2020. Virtual event
-
Submission deadline Extended:
April 5, 2020https://easychair.org/conferences/?conf=brainpil2020 -
Notification of acceptance:
April 12, 2020May 2, 2020 -
Camera-ready deadline:
April 19, 2020May 15, 2020
Description
More than thirty years after Moravec described one of the fundamental paradoxes of intelligence, robots still perform poorly in unconstrained or unknown environments. They have limited perception, control, and reasoning capabilities, and are not yet able to carry out natural interactions with humans. Is low level perception and mobility still the challenge?
Brain-inspired robotics, an interdisciplinary area that brings together researchers from fields, such as robotics, cognitive science, neuroscientist, mechatronics, offers a unique promise to develop novel AI algorithms and advances the state-of-the-art in robotic perception, learning, and control. The symbiosis between these communities has already a significant place in the AI history; for example Temporal Reinforcement Learning, borrowed from operant conditioning, was the seed for the most advanced Deep-RL algorithms, which outperform humans in most challenging games invented to this date. 500 million years of brain evolution is thus a recipe book for developing engineering solutions in robotics for perception, interaction, and learning. There is only one obstacle; It is written in an unknown language.
This workshop aims to bring forward current challenges in robotics and autonomous systems that can be solved using brain-inspired approaches and to share useful findings from neuroscience that can revolutionize AI and Robotics.
Keynote Speakers
- Matthew Botvinick. DeepMind / UCL – UK
- Aude Billard. École Polytechnique Fédérale de Lausanne – Switzerland
- Fumiya Iida. Cambridge University – UK
- Joni Dambre. Ghent University – Belgium
- Auke Ijspeert. École Polytechnique Fédérale de Lausanne – Switzerland
- Jun Tani. Okinawa Institute of Science and Technology – Japan
- Mehdi Khamassi. Sorbonne Université – France
- Manuel Lopes. Instituto Superior Tecnico, INESC-ID - Lisboa
- Ravinder Dahiya. University of Glasgow
Organizers
- Mohsen Kaboli. Senior Research Scientist, BMW Research, AI, Robotics, and Cognitive Systems Center of Excellence, BMW Group 85748, Munich, Germany. web
- Tansu Celikel. Professor. Donders Institute for Brain, Cognition and Behaviour, Heyendaalseweg 135, 6525 HJ Nijmegen, the Netherlands web
- Natalia Díaz-Rodríguez. Assistant Professor. U2IS - ENSTA, Institute Polytechnique Paris. 828, Bd des Maréchaux 91762 Palaiseau, France. web
- David Filliat, Professor. U2IS - ENSTA, Institute Polytechnique Paris. 828, Bd des Maréchaux 91762 Palaiseau, France. web
- Pablo Lanillos. Assistant Professor in Cognitive AI. Donders Institute for Brain, Cognition and Behaviour. Montessorilaan 3 6525 HR Nijmegen, the Netherlands, web
Topics:
This workshop is intended for roboticist and neuroscientist working in the areas of brain-inspired robotics, neurorobotics, machine learning, perception in navigation and mobility, cognitive systems and human-robot interaction. The topics of interest include, but are not limited to:
- Brain-like perception (tactile, vision, etc) and information fusion
- Brain-like Interaction and learning
- Brain-inspired navigation and mobility
- Brain-inspired ML for robotics (Temporal RL, Deep-RL, Neural Networks)
- Brain-Inspired Cognitive Architectures
- Neuroscientific-inspired AI (Predictive coding)
- Intrinsic body intelligence and adaptation
- Decision making in neuro-robotics systems
- Skill and Knowledge transfer system for multiple neuro-robotic systems
- Brain-inspired Transfer Learning
- Brain-inspired control robotic system
- Brain-inspired planning, navigation, and mobility
Call for contributions
We cordially invite you to submit your contribution to the workshop “New advances in brain-inspired perception, interaction and learning”, a full-day workshop at IEEE International Conference on Robotics and Automation (ICRA 2020), to be held in Paris, France, on May 31st, 2020.
Send your contribution (max 4 pages) through easychair before March 15 to:
https://easychair.org/conferences/?conf=brainpil2020
Call for contributions (detailed)
We invite participants to submit extended abstracts, short papers (max 4 pages) or 5 minutes videos of relevant work. Publications to be presented at the main conference are also welcome. The accepted contributions will be posted on the workshop website but they will not appear in the official IEEE proceedings. The reviewing is single blind and will be edited by the workshop organizers.
Submissions must be sent in pdf, following the IEEE conference style (two-columns) by the easychair system: Any questions please send an email to brainpil@gmail.com
The template for the contributions is IEEE RAS workshop (Latex Template). The following paper categories are welcome:
-
Short papers (max 4 pages).
-
Video contribution. Submit a pdf explaining the video and embed the link on the text.
Accepted contributions will have the opportunity to present their work/ideas to the audience in a poster highlights slot.
Moreover, excellent submissions will give a 15 min talk at the workshop.
Furthermore, a selective number of papers from the poster sessions will be invited to submit their extended novel work to Nature Machine Intelligence.
Sponsors
This workshop is supported by the following IEEE-RAS Technical Committees:
Furthermore, the event is supported by iNavigate (EU Horizon 2020 RISE-Network) grant agreement no: 873178, BWM research and SELFCEPTION project (selfception.eu) EU H2020 grant agreement no. 741941.
